













Nema 14 Closed-Loop-Schrittmotor 12,5 Ncm/17,73 oz.in mit magnetischem Encoder 1000PPR (4000CPR)
")
")
")
")
")
")
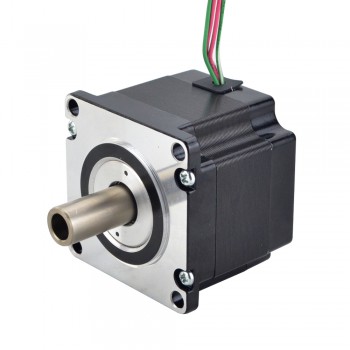
Nema 14 Closed-Loop-Schrittmotor 12,5 Ncm/17,73 oz.in mit magnetischem Encoder 1000PPR (4000CPR)
Dies ist der dünnste Schrittmotor mit geschlossenem Regelkreis, den wir haben. Er ist nur 34,5 mm dick und verfügt über einen Encoder. Der Encoder ist ein magnetischer Encoder mit 3 Kanälen und einer Auflösung von 1000 PPR (4000 CPR). Der größte Vorteil magnetischer Encoder liegt in der Größe und den Kosten.
Elektrische Spezifikation
Hersteller #: 14HS11-1004-ME1K
Anzahl der Phasen: 2
Schrittwinkel: 1.8Grad
Haltemoment: 12.5Ncm(17.73oz.in)
Strom: 1.0A
Phasenwiderstand: 3.5ohms± 10%
Induktivität: 3.5mH ± 20%(1KHz)
Physikalische Spezifikation
Rahmengröße: 35 x 35mm
Körper Länge: 28mm
Schaftdurchmesser: Φ5mm
Schaftlänge: 24mm
D-Cut Wellenlänge: 15mm
Leitungslänge: 500mm
Encoder Spezifikation
Ausgangsschaltungs Art: Differential
Encodertyp: magnetisch inkrementell
Encoderauflösung: 1000PPR(4000CPR)
Ausgangssignalkanäle: 3 Kanäle
Versorgungsspannung min: 3.3V
Versorgungsspannung max: 5.5V
Ausgangsstrom: 20mA
Ausgang Hochspannung: 5V
Ausgang niedrige Spannung: 0.2V
Ausgangsfrequenz max: 400kHZ
Anschluss von Motor und Geber
| Motor | A+ | A- | B+ | B- |
| Wire | RED | Schwarz | Gelb | Blau |
| Encoder | VCC | EGND | EA+ | EA- | EB+ | EB- | EZ+ | EZ- |
| Wire | Rot | Schwarz | Braun | Orange | Blau | Grün | Gelb | Weiss |
Ressourcen
| Elektrische Spezifikation | |
|---|---|
| Haltemoment (Ncm) | 12.5 |
| Induktivität(mH) | 3.5 |
| Phasenwiderstand(ohm) | 3.5 |
| Nennstrom (A) | 1 |
| Encodertyp | Magnetic Incremental |
| Ausgangsschaltungs Art | Differential type |
| Encoderauflösung | 1000PPR(4000CPR) |
| Ausgangssignalkanäle | 3 |
| Physikalische Spezifikation | |
| Körper Länge(mm) | 28 |
| Rahmengröße(mm) | Nema 14 (35 x 35) |
| Schaftdurchmesser(mm) | 5 |
| Schaftlänge(mm) | 24 |
| Produktart | Closed Loop Stepper Motor |
| IP-Bewertung | 40 |








 Oyostepper Site:
Oyostepper Site: