


Anwendung und Funktionsprinzip des NEMA 17-Schrittmotors
NEMA 17 ist ein Schrittmotor mit einem Schrittwinkel von 1,8°. Der Winkel entspricht 200 Schritten/Umdrehung. Im Betrieb kann jede Phase des Motortyps bei einer Spannung von 12V einen Strom von 12A aufnehmen.
Somit reicht der Strom aus, um ein Haltemoment von 3,2 kg-cm aufrechtzuerhalten. Beachten Sie außerdem, dass der Motortyp über sechs farblich gekennzeichnete Drähte verfügt. Darüber hinaus verfügt jedes Kabel über eine blanke Ader. Daher sind die Kabel notwendig, um die Steuerung durch unipolare und bipolare Schrittmotortreiber zu unterstützen.
Wenn Sie ihn mit einem unipolaren Schrittmotortreiber verwenden wollen, benötigen Sie alle sechs Drähte. Wenn Sie hingegen bipolare Schrittmotordrähte verwenden möchten, müssen Sie einige Drähte weglassen. Beachten Sie, dass die empfohlene Betriebsart die Verwendung mit einem bipolaren Schrittmotor-Treiber während der eigentlichen Motorsteuerung ist.
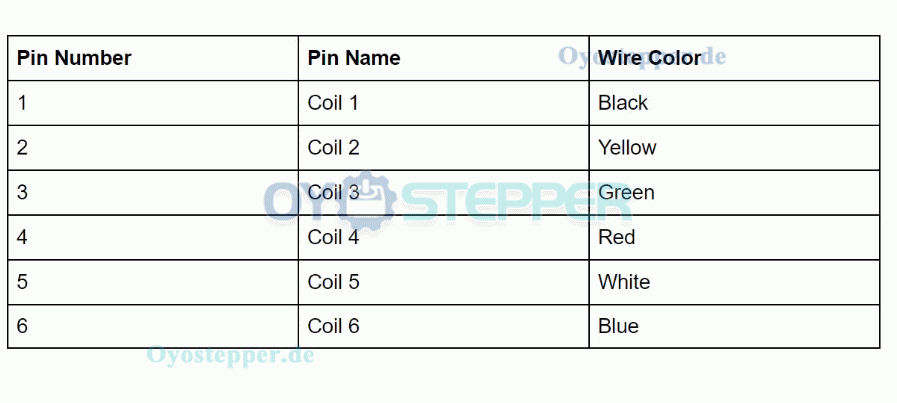
Der Schrittmotor-Controller verfügt über sechs Drähte oder Spulen, jeweils für einen bestimmten Zweck. Die Kabel sind in zwei Hauptteilen gewickelt. Erstens gibt es die schwarzen, gelben und grünen Drähte an der ersten Wicklung der Spule. Als nächstes bilden die roten, weißen und blauen Drähte den zweiten Teil der Wicklung. Hier ist die Darstellung der Pinbelegung des Motors:
Wie verwende ich die NEMA 17 Motoren?
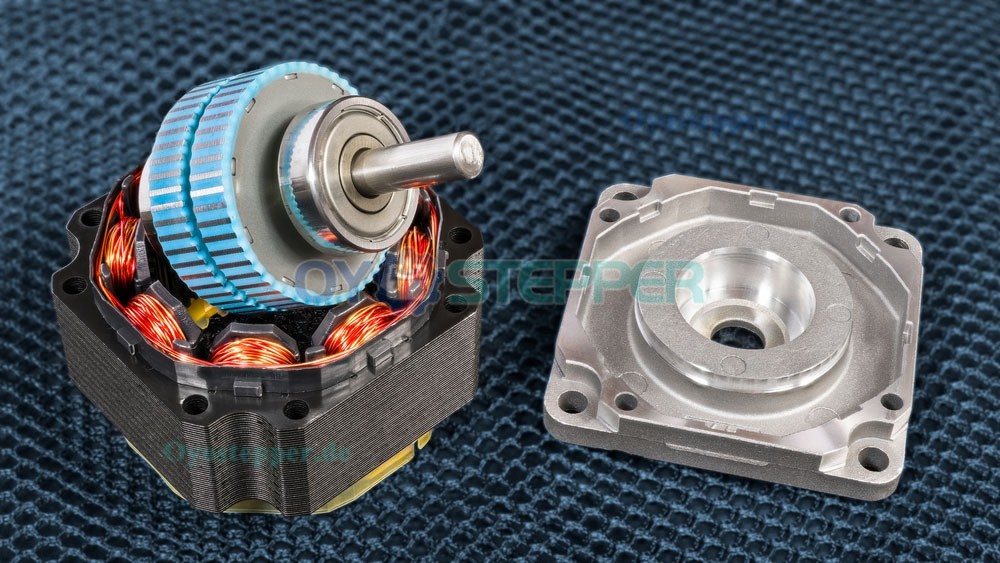
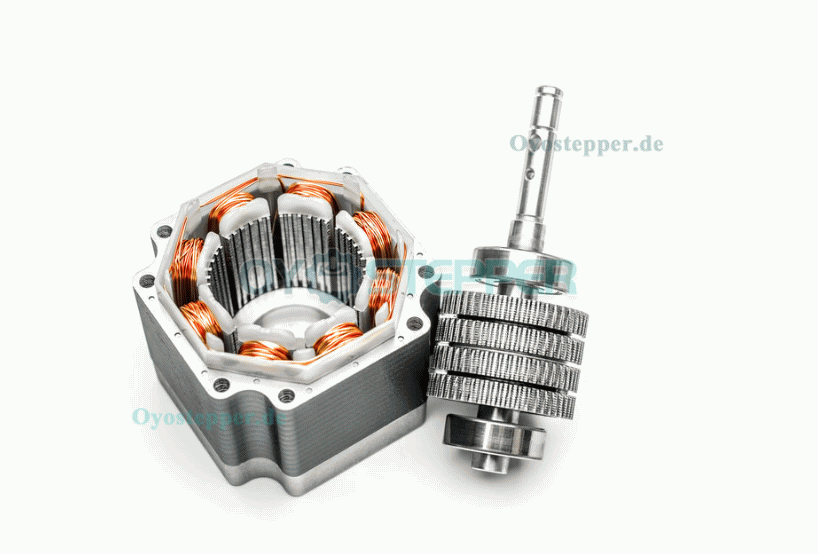
Die Verwendung der NEMA 17-Schrittmotoren ist relativ einfach. Schauen Sie sich zunächst das Spulendiagramm unten an. Es ist wichtig zu verstehen, wie sich der Schrittmotor um die Verdrahtungsphasen dreht.
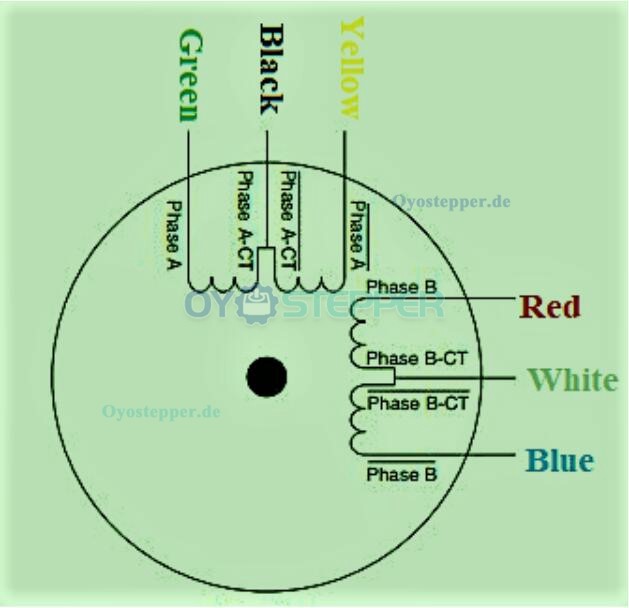
Beachten Sie, dass NEMA 17-Schrittmotoren während des Betriebs dazu neigen, hohe Ströme zu verbrauchen. Daher ist es zwingend erforderlich, einen Treiber-IC wie den A4988 zu verwenden. Außerdem verfügt der Motor über sechs Drähte, die mit zwei geteilten Wicklungen verbunden sind. Während des Betriebs sind die Anzapfungen der Mittelwicklung mit der positiven Versorgung verbunden. Die beiden Enden jeder Wicklung sind über einen Treiberkreis austauschbar geerdet.
Anwendungen:
Die Schrittmotoren sind in Systemen einsetzbar, die eine präzise Steuerung erfordern, sowie in anderen kritischen kommerziellen Anwendungen. Außerdem kommen sie kann in Anwendungen vor, bei denen die Komplexität eines Feedback-Steuerungssystems überwunden werden soll. Im Folgenden finden Sie einige Anwendungsbeispiele, bei denen der oder die Elektromotoren hilfreich sind:
CNC-Maschinen
Druckermotoren, z. B. in einem 3D-Druckermotor
Nützlich bei Linearaktuatoren
Präzise Steuermaschinen
Festplatte
3D-Drucker/CNC- oder Prototyping-Maschinen (z. B. RepRap)
Laserschneider;
Schrittmotoren scheinen in ihrem Aufbau anspruchsvoll zu sein, funktionieren aber nach einem einfachen Prinzip, wie wir gerade erklärt haben. Bei weiteren Fragen zur Funktionsweise des NEMA 17-Schrittmotors können Sie sich gerne an uns wenden.
Zurück:Wie steuere ich den Nema23-Schrittmotor?
Next:Was ist der Unterschied zwischen Captive- und Non-Captive-Linearschrittmotoren?